![]() INSTALLATION AND OPERATION
INSTALLATION AND OPERATION
USER MANUAL
WWW.UNICORECOMM.COM  UM980
UM980
BDS/GPS/GLONASS/Galileo/QZSS
All-constellation Multi-frequency
High Precision RTK Positioning Module
Copyright© 2009-2023, Unicore Communications, Inc.
Data subject to change without notice.
Contents
Revision History
| Version | Revision History | Date |
| R1.0 | First release | 2022-08 |
| R1.1 | If hot start is not used, V_BCKP should be connected to VCC; Update the IO threshold in Table 2-4; Add section 3.1: Recommended Minimal Design; Update the recommended thickness of the stencil in Chapter 4 |
2022-10 |
| R1.2 | Update the supported frequencies; Update the TTFF; Add chapter 3.5: Recommended PCB Package Design; Optimize Chapter 3.2 Antenna Feed Design; Optimize Chapter 3.3 Power-on and Power-off |
2023-04 |
| R1.3 | Add PPP accuracy in section 1.2 | 2023-09 |
UM980 User Manual
Legal right notice
This manual provides information and details on the products of Unicore Communication, Inc. (“Unicore”) referred to herein.
All rights, title and interest to this document and the information such as data, designs, layouts contained in this manual are fully reserved, including but not limited to the copyrights, patents, trademarks and other proprietary rights as relevant governing laws may grant, and such rights may evolve and be approved, registered or granted from the whole information aforesaid or any part(s) of it or any combination of those parts. Unicore holds the trademarks of “Hexinxingtong”, “UNICORECOMM” and other trade name, trademark, icon, logo, brand name and/or service mark of Unicore products or their product serial referred to in this manual (collectively “Unicore Trademarks”).
This manual or any part of it, shall not be deemed as, either expressly, implied, by estoppel or any other form, the granting or transferring of Unicore rights and/or interests (including but not limited to the aforementioned trademark rights), in whole or in part.
Disclaimer
The information contained in this manual is provided “as is” and is believed to be true and correct at the time of its publication or revision. This manual does not represent, and in any case, shall not be construed as a commitments or warranty on the part of Unicore with respect to the fitness for a particular purpose/use, the accuracy, reliability and correctness of the information contained herein.
Information, such as product specifications, descriptions, features and user guide in this manual, are subject to change by Unicore at any time without prior notice, which may not be completely consistent with such information of the specific product you purchase.
Should you purchase our product and encounter any inconsistency, please contact us or our local authorized distributor for the most up-to-date version of this manual along with any addenda or corrigenda.
Foreword
This document describes the information of the hardware, package, specification and the use of Unicore UM980 modules.
Target Readers
This document applies to technicians who possess the expertise on GNSS receivers.
Introduction
UM980 is a new generation of GNSS high precision RTK positioning module from Unicore. It supports all constellations and all frequencies, and can simultaneously track BDS B1I/B2I/B3I/B1C/B2a/B2b, GPS L1/L2/L5, GLONASS G1/G2/G3, Galileo E1/E5a/E5b/E6, QZSS L1/L2/L5, NavIC L5 and SBAS. The module is mainly used in surveying and mapping, precise agriculture, UAVs, and autonomous robots.
UM980 is based on NebulasIVTM , a GNSS SoC which integrates the RF-baseband and high precision algorithm. Besides, the SoC integrates a dual-core CPU, a high speed floating point processor and an RTK co-processor with 22 nm low power design, and it supports 1408 super channels. All these above enable stronger signal processing.
With the built-in JamShield adaptive anti-jamming technology, UM980 can fulfill a strengthening RTK engine solution of multi-mode multi-frequency, which ensures a good performance on RTK initialization speed, measurement accuracy and reliability
even in the most challenging environments such as urban canyons and tree shades.
Furthermore, UM980 supports abundant interfaces such as UART, I 2 * C , SPI * , as well as 1PPS, EVENT, CAN * , which meets the customers’ needs in different applications. * I 2 C, SPI, CAN: reserved interfaces, not supported currently
* I 2 C, SPI, CAN: reserved interfaces, not supported currently
1.1 Key Features
- Based on the new generation GNSS SoC -NebulasⅣTM , with RF-baseband and high precision algorithm integrated
- 17 mm × 22 mm × 2.6 mm, surface-mount device
- Supports all-constellation multi-frequency on-chip RTK positioning solution
- Supports BDS B1I/B2I/B3I/B1C/B2a/B2b + GPS L1/L2/L5 + GLONASS G1/G2/G3 + Galileo E1/E5a/E5b/E6 + QZSS L1/L2/L5 + NavIC L5 + SBAS
- All-constellation multi-frequency RTK engine and advanced RTK processing technology
- Instantaneous RTK initialization technology
- Independent tracking of different frequencies, and 60 dB narrowband anti-jamming technology
1.2 Key Specifications
Table 1-1 Technical Specifications
| Basic Information | |
| Channels | 1408 channels, based on NebulasIVTM |
| Constellations | BDS/GPS/GLONASS/Galileo/QZSS |
| Frequencies | BDS: B1I, B2I, B3I, B1C, B2a, B2b GPS: L1 C/A, L1C, L2P (Y), L2C, L5 GLONASS: G1, G2, G3 Galileo: E1, E5a, E5b, E6 QZSS: L1, L2, L5 NavIC: L5 |
| Power | |
| Voltage | +3.0 V ~ +3.6 V DC |
| Power Consumption | 480 mW (Typical) |
Performance
| Positioning Accuracy | Single Point Positioning) (RMS) | Horizontal: 1.5 m | ||
| Vertical: 2.5 m | ||||
| DGPS (RMS)12 | Horizontal: 0.4 m | |||
| Vertical: 0.8 m | ||||
| RTK (RMS)12 | Horizontal: 0.8 cm + 1 ppm | |||
| Vertical: 1.5 cm + 1 ppm | ||||
| PPP (RMS)3 | Horizontal: 5 cm | |||
| Vertical: 10 cm | ||||
| Observation Accuracy (RMS) | BDS | GPS | GLONASS | Galileo |
| B11/B1C/L1C/L1 C/A/G1/E1 Pseudorange | 10 cm | 10 cm | 10 cm | 10 cm |
| B11/B1C/L1C/L1 C/A/GI/El Carrier Phase | 1 mm | 1 mm | 1 mm | 1 mm |
| B3I/L2P(Y)/L2C/G2/E6 Pseudorange | 10 cm | 10 cm | 10 cm | 10 cm |
| B3I/L2P(Y)/L2C/G2/E6 Carrier Phase | 1 mm | 1 mm | 1 mm | 1 mm |
| B21/B2a/B2b/L5/G3/E5a/E5b Pseudorange | 10 cm | 10 cm | 10 cm | 10 cm |
| B2I/B2a/B2b/L5/G3/E5a/E5b Carrier Phase | 1 mm | 1 mm | 1 mm | 1 mm |
| Time Pulse Accuracy (RMS) | 20 ns | |||
1. Test results may be biased due to atmospheric conditions, baseline length, GNSS antenna type, multipath, number of visible satellites, and satellite geometry
2. The measurement uses a 1 km baseline and a receiver with good antenna performance, regardless of possible errors of antenna phase center offset
3. After 20 minutes of convergence under open sky without jamming
| Velocity Accuracy (RMS) | 0.03 m/s |
| Time to First Fixs (TTFF) | Cold Start < 12 s |
| Hot Start < 4 s | |
| Initialization Time1 | < 5 s (Typical) |
| Initialization Reliability) | > 99.9% |
| Data Update Rate | 50 Hz6 Positioning |
| Differential Data | RTCM 3.X |
| Data Format | NMEA-0183, Unicore |
| Physical Characteristics | |
| Package | 54 pin LGA |
| Dimensions | 22 mm x 17 mm x 2.6 mm |
| Weight | 1.889 t 0.03 g |
| Environmental Specifications | |
| Operating Temperature | -40 °C — +85 °C |
| Storage Temperature | -55 °C — +95 °C |
| Humidity | 95% No condensation |
| Vibration | GJB150.16A-2009, MIL-STD-81 OF |
| Shock | GJB150 18A-2009, MIL-STD-810F |
| Functional Ports | |
| UART x 3 | |
| 12C* x 1 | |
| SPI* x 1 | Slave |
4. Open sky, unobstructed scene, 99% @ static
5. -130dBm @ more than 12 available satellites
6. Supports 50 Hz in specific mode
| CAN * × 1 | Shared with UART3 |
* I2C, SPI, CAN: reserved interfaces, not supported currently
1.3 Block Diagram 
- RF Part
The receiver gets filtered and enhanced GNSS signal from the antenna via a coaxial cable. The RF part converts the RF input signals into the IF signals, and converts IF analog signals into digital signals required for NebulasIVTM chip (UC9810). - NebulasIVTM SoC (UC9810)
NebulasIV (UC9810) is UNICORECOMM’s new generation high precision GNSS SoC with 22 nm low power design, supporting all constellations all frequencies and 1408 super channels. It integrates a dual-core CPU, a high speed floating point processor and an RTK co-processor, which can fulfill the high precision baseband processing and RTK positioning independently. - External Interfaces
The external interfaces of UM980 include UART, I2*C, SPI*, CAN*, PPS, EVENT, RTK_STAT, PVT_STAT, ERR_STAT, RESET_N, etc.
Hardware
2.1 Pin Definition  Table 2-1 Pin Description
Table 2-1 Pin Description
| No. | Pin | I/O | Description |
| 1 | GND | — | Ground |
| 2 | ANT_IN | I | GNSS antenna signal input |
* I2C, SPI, CAN: reserved interfaces, not supported currently
| No. | Pin | I/O | Description |
| 3 | GND | — | Ground |
| 4 | ANT_DETECT | I | Antenna signal detection |
| 5 | ANT_OFF | 0 | Disable external LNA |
| 6 | ANT_SHORT_N | I | Antenna short circuit detection; active low |
| 7 | VCC_RP | 0 | External LNA power supply |
| 8 | SPIS_CSN | I | Chip select pin for SPI slave |
| 9 | SPIS_MOSI | I | Master Out / Slave In. This pin is used to receive data in slave mode. |
| 10 | SPIS_CLX | I | Clock input pin for SPI slave |
| 11 | SPIS_MISO | 0 | Master In / Slave Out. This pin is used to transmit data in slave mode. |
| 12 | GND | — | Ground |
| 13 | RSV | — | Reserved |
| 14 | GND | — | Ground |
| 15 | NC | — | No connection inside |
| 16 | NC | — | No connection inside |
| 17 | NC | — | No connection inside |
| 18 | NC | — | No connection inside |
| 19 | PVT_STAT | 0 | PVT status: active high; outputs high when positioning and low when not positioning |
7. Not recommended to take VCC_RF as ANT_BIAS to feed the antenna. See section 3.2 for more details.
| No. | Pin | I/O | Description |
| 20 | RTICSTAT | 0 | Ern( status active high; outputs high for RTK fixed solution and low for other positioning status or no positioning |
| 21 | ERFLSTAT | 0 | Error status: active high; outputs high when failing self-test, and low when passing self-test |
| 22 | RSV | — | Reserved, recommended to be floating |
| 23 | RSV | — | Reserved, recommended to be floating |
| 24 | NC | — | No connection inside |
| 25 | NC | — | No connection inside |
| 26 | RXD2 | I | COM2 input, LVTTL level |
| 27 | TXD2 | 0 | COM2 output, LVTTL level |
| 28 | BIF | — | Built-in function; recommended to add a through-hole testing point and a 10 la pull-up resistor; cannot connect ground or power supply, and cannot input/output data, but can be floating |
| 29 | BIF | — | Built-in function; recommended to add a through-hole testing point and a 10 IQ pull-up resistor; cannot connect ground or power supply, and cannot input/output data, but can be floating |
| 30 | TXD3 | 0 | COM3 output, which can be used as CAN TXD, LVTTL level |
| 31 | RXD3 | I | COM3 input, which can be used as CAN RXD, LVTTL level |
| 32 | GND | — | Ground |
| 33 | VCC | I | Power supply |
| 34 | VCC | I | Power supply |
| 35 | RSV | — | Reserved |
| 36 | V_BCKP | I | When the main power supply VCC is cut off, V_BCKP supplies power to RTC and relevant register. Level requirement: 2.0 V ~ 3.6 V, and the working current should be less than 60 μA at 25 °C. If you do not use the hot start function, connect V_BCKP to VCC. Do NOT connect it to ground or leave it floating. |
| 37 | GND | — | Ground |
| 38 | NC | — | No connection inside |
| 39 | NC | — | No connection inside |
| 40 | NC | — | No connection inside |
| 41 | GND | — | Ground |
| 42 | TXD1 | O | COM1 output, LVTTL level |
| 43 | RXD1 | I | COM1 input, LVTTL level |
| 44 | SDA | I/O | I2 C data |
| 45 | SCL | I/O | I2 C clock |
| 46 | NC | — | No connection inside |
| 47 | NC | — | No connection inside |
| 48 | GND | — | Ground |
| 49 | RESET_N | I | System reset; active Low. The active time should be no less than 5 ms. |
| 50 | NC | — | No connection inside |
| 51 | EVENT | I | Event mark input, with adjustable frequency and polarity |
| 52 | NC | — | No connection inside |
| 53 | PPS | O | Pulse per second, with adjustable pulse width and polarity |
| 54 | NC | — | No connection inside |
2.2 Electrical Specifications
2.2.1 Absolute Maximum Ratings
Table 2-2 Absolute Maximum Ratings
| Parameter | Symbol | Min. | Max. | Unit |
| Power Supply Voltage | VCC | -0.3 | 3.6 | V |
| Input Voltage | Vin | -0.3 | 3.6 | V |
| GNSS Antenna Signal Input | ANT_IN | -0.3 | 6 | V |
| Antenna RF Input Power | ANT_IN input power |
10 | dBm | |
| External LNA Power Supply | VCC_RF | -0.3 | 3.6 | V |
| VCC_RF Output Current | ICC_RF | 100 | mA | |
| Storage Temperature | Tstg | -55 | 95 | °C |
2.2.2 Operating Conditions
Table 2-3 Operating Conditions
| Parameter | Symbol | Min. | Typ. | Max. | Unit | Condition |
| Power Supply Voltage8 | VCC | 3 | 3.3 | 3.6 | V | |
| Maximum VCC Ripple | Vrpp | 0 | 50 | mV |
8. The voltage range of VCC (3.0 V ~ 3.6 V) has already included the ripple voltage.
| Parameter | Symbol | Min. | Typ. | Max | Unit | Condition |
| Working Current9 | Iopr | 145 | 180 | mA | VCC=3.3 V | |
| VCC_RF Output Voltage | VCC_RF | VCC-0.1 | V | |||
| VCC_RF Output Current | ICC_RF | 50 | mA | |||
| Operating Temperature | Topr | -40 | 85 | °C | ||
| Power Consumption | P | 480 | mW |
2.2.3 IO Threshold
Table 2-4 IO Threshold
| Parameter | Symbol | Min. | Typ. | Max. | Unit | Condition |
| Low Level Input Voltage | Vin_low | 0 | 0.6 | V | ||
| High Level Input Voltage | Vin_high | VCC × 0.7 | k | VCC + 0.2 | V | |
| Low Level Output Voltage | Vout_low | 0 | 0.45 | V | Iout = 2 mA | |
| High Level Output Voltage | Vout_high | VCC – 0.45 |
VCC | V | Iout = 2 mA |
2.2.4 Antenna Feature
Table 2-5 Antenna Feature
| Parameter | Symbol | Min. | Typ. | Max. | Unit | Condition |
| Optimum Input Gain | Gant | 18 | 30 | 36 | dB |
9. Since the product has capacitors inside, inrush current occurs during power-on. You should evaluate in the actual environment in order to check the effect of the supply voltage drop caused by inrush current in the system.
2.3 Dimensions
Table 2-6 Dimensions
| Parameter | Min. (mm) | Typ. (mm) | Max. (mm) |
| A | 21.80 | 22.00 | 22.50 |
| B | 16.80 | 17.00 | 17.50 |
| C | 2.40 | 2.60 | 2.80 |
| D | 3.75 | 3.85 | 3.95 |
| E | 0.95 | 1.05 | 1.15 |
| F | 1.80 | 1.90 | 2.00 |
| G | 1.00 | 1.10 | 1.20 |
| H | 0.70 | 0.80 | 0.90 |
| K | 1.40 | 1.50 | 1.60 |
| M | 3.55 | 3.65 | 3.75 |
| N | 3.15 | 3.25 | 3.35 |
| P | 2.00 | 2.10 | 2.20 |
| R | 1.00 | 1.10 | 1.20 |
| X | 0.72 | 0.82 | 0.92 |

Hardware Design
3.1 Recommended Minimal Design 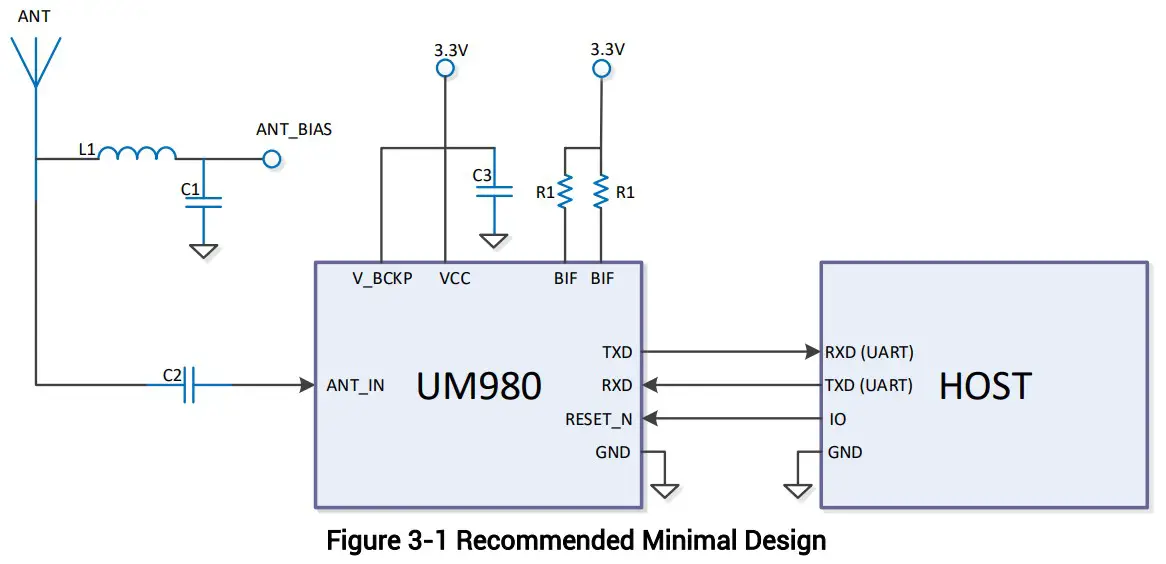 L1: 68 nH RF inductor in 0603 package is recommended
L1: 68 nH RF inductor in 0603 package is recommended
C1: 100 nF + 100 pF capacitors connected in parallel is recommended
C2: 100 pF capacitor is recommended
C3: N * 10 μF + 1 * 100 nF capacitors connected in parallel is recommended, and the total inductance should be no less than 30 μF
R1: 10 kΩ resistor is recommended
3.2 Antenna Feed Design
UM980 just supports feeding the antenna from the outside of the module rather than from the inside. It is recommended to use devices with high power and that can withstand high voltage. Gas discharge tube, varistor, TVS tube and other high-power protective devices may also be used in the power supply circuit to further protect the module from lightning strike and surge.
If the antenna feed supply ANT_BIAS and the module’s main supply VCC use the same power rail, the ESD, surge and overvoltage from the antenna will have an effect on VCC, which may cause damage to the module. Therefore, it is recommended to design an independent power rail for the ANT_BIAS to reduce the possibility of module damage. 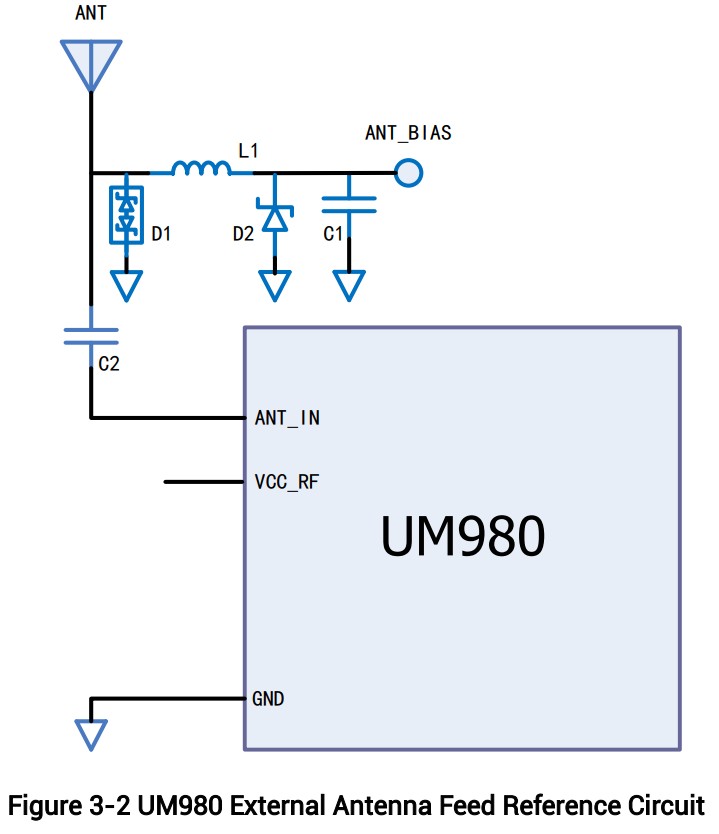 Notes:
Notes:
- L1: feed inductor, 68 nH RF inductor in 0603 package is recommended
- C1: decoupling capacitor, recommended to connect two capacitors of 100 nF/100 pF in parallel
- C2: DC blocking capacitor, recommended 100 pF capacitor
- It is not recommended to take VCC_RF as ANT_BIAS to feed the antenna (VCC_RF is not optimized for anti-lightning strike, anti-surge and over current protection due to the compact size of the module)
- D1: ESD diode, choose the ESD protection device that supports high frequency signals (above 2000 MHz)
- D2: TVS diode, choose the TVS diode with appropriate clamping specification according to the requirement of feed voltage and antenna withstand voltage
3.3 Power-on and Power-off
VCC
- The VCC initial level when power-on should be less than 0.4 V.
- The VCC ramp when power-on should be monotonic, without plateaus.
- The voltages of undershoot and ringing should be within 5% VCC.
- VCC power-on waveform: The time interval from 10% rising to 90% must be within 100 μs ~1 ms.
- Power-on time interval: The time interval between the power-off (VCC < 0.4 V) to the next power-on must be larger than 500 ms.
V_BCKP
- The V_BCKP initial level when power-on should be less than 0.4 V.
- The V_BCKP ramp when power-on should be monotonic, without plateaus.
- The voltages of undershoot and ringing should be within 5% V_BCKP.
- V_BCKP power-on waveform: The time interval from 10% rising to 90% must be within 100 μs ~1 ms.
- Power-on time interval: The time interval between the power-off (V_BCKP < 0.4 V) to the next power-on must be larger than 500 ms.
3.4 Grounding and Heat Dissipation  The 48 pads in the rectangle in Figure 3-3 are for grounding and heat dissipation. In the PCB design, the pads should be connected to a large sized ground to strengthen the heat dissipation.
The 48 pads in the rectangle in Figure 3-3 are for grounding and heat dissipation. In the PCB design, the pads should be connected to a large sized ground to strengthen the heat dissipation.
3.5 Recommended PCB Package Design
See the following figure for the recommended PCB package design. 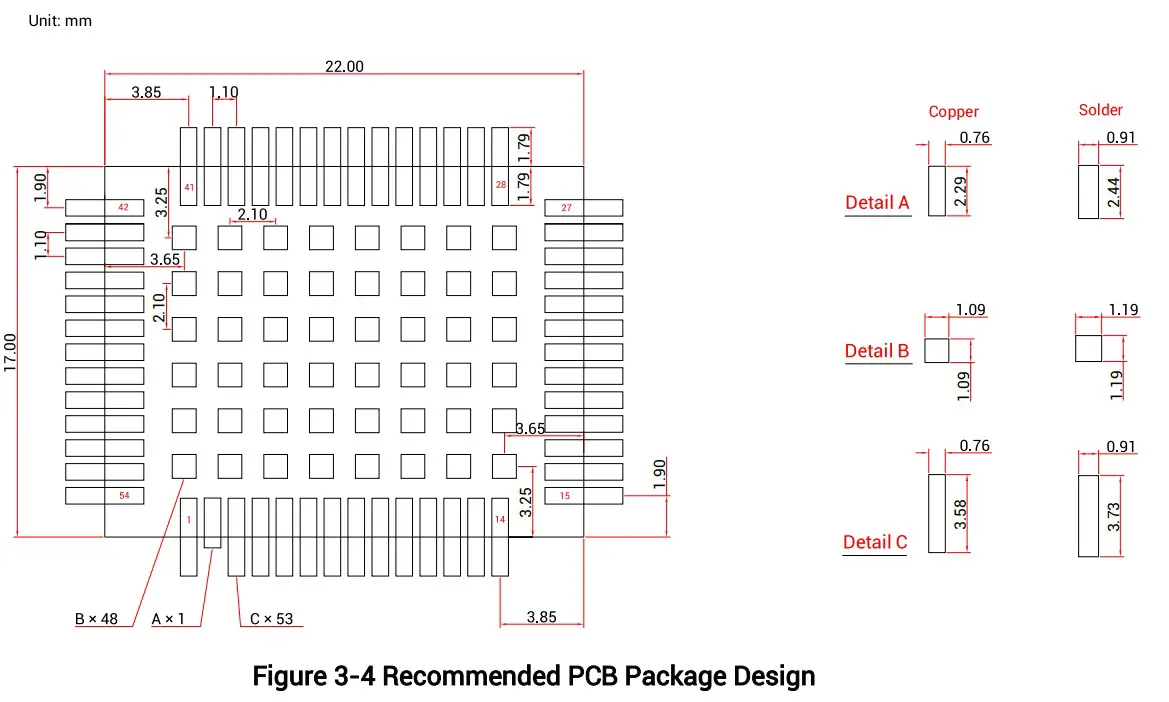 Notes:
Notes:
For the convenience of testing, the soldering pads of the pins are designed long, exceeding the module border much more. For example:
- The pads denoted as detail C are 1.79 mm longer than the module border.
- The pad denoted as detail A is 0.50 mm longer than the module border. It is relatively short as it is an RF pin pad, so we hope the trace on the surface is as short as possible to reduce the impact of external interference on the RF signals.
Production Requirement
Recommended soldering temperature curve is as follows: Temperature Rising Stage
Temperature Rising Stage
- Rising slope: Max. 3 ° C/s
- Rising temperature range: 50 ° C ~ 150 °C
Preheating Stage
- Preheating time: 60s ~ 120 s
- Preheating temperature range: 150 °C ~ 180 °C
Reflux Stage
- Over melting temperature (217 °C) time: 40s ~ 60 s
- Peak temperature for soldering: no higher than 245 °C
Cooling Stage
- Cooling slope: Max. 4 °C / s
- In order to prevent falling off during soldering of the module, do not solder it on the back of the board during design, and it is not recommended to go through soldering cycle twice.
- The setting of soldering temperature depends on many factors of the factory, such as board type, solder paste type, solder paste thickness etc. Please also refer to the relevant IPC standards and indicators of solder paste.
- Since the lead soldering temperature is relatively low, if using this method, please give priority to other components on the board.
- The opening of the stencil needs to meet your design requirement and comply with the examine standards. The thickness of the stencil is recommended to be 0.15mm.
Packaging
5.1 Label Description  5.2 Product Packaging
5.2 Product Packaging
The UM980 module uses carrier tape and reel (suitable for mainstream surface mount devices), packaged in vacuum-sealed aluminum foil antistatic bags, with a desiccant inside to prevent moisture. When using reflow soldering process to solder modules, please strictly comply with IPC standard to conduct temperature and humidity control on the modules. As packaging materials such as the carrier tape can only withstand the temperature of 55 degrees Celsius, modules shall be removed from the package during baking.  Note:
Note:
- The cumulative tolerance of 10 side holes should not exceed ± 0.2 mm.
- Material of the tape: Black antistatic PS (surface impedance 10 5 -10 11) (surface static voltage <100 V), thickness: 0.35 mm.
- Total length of the 13-inch reel package: 6.816 m (Length of the first part of empty packets: 0.408 m, length of packets containing modules: 6 m, length of the last part of empty packets: 0.408 m).
- Total number of packets in the 13-inch reel package: 284 (Number of the first part of empty packets: 17; actual number of modules in the packets: 250; number of the last part of empty packets: 17).
- All dimension designs are in accordance with EIA-481-C-2003.
- The maximum bending degree of the carrier tape within the length of 250 mm should not exceed 1 mm (see the figure below).
 Table 5-1 Package Description
Table 5-1 Package Description
| Item | Description |
| Module Number | 250 pieces/reel |
| Reel Size | Tray: 13″ External diameter: 330 ± 2 mm, Internal diameter: 180 ± 2mm, Width: 44.5 ± 0.5 mm Thickness: 2.0 ± 0.2 mm |
| Carrier Tape | Space between (center-to-center distance): 24 mm |
Before surface mounting, make sure that the color of the 30% circle on the HUMIDITY INDICATOR is blue (see Figure 5-4). If the color of the 20% circle is pink and the color of the 30% circle is lavender (see Figure 5-5), you must bake the module until it turns to blue. The UM980 is rated at MSL level 3. Please refer to the IPC/JEDEC J-STD-033 standards for the package and operation requirements. You may also access to the website www.jedec.org to get more information.  The shelf life of the UM980 module packaged in vacuum-sealed aluminum foil antistatic bags is one year.
The shelf life of the UM980 module packaged in vacuum-sealed aluminum foil antistatic bags is one year.
![]() Unicore Communications, Inc.
Unicore Communications, Inc.
F3, No.7, Fengxian East Road, Haidian, Beijing, P.R.China, 100094
www.unicorecomm.com
Phone: 86-10-69939800
Fax: 86-10-69939888
[email protected]
www.unicorecomm.com
UC-00-M32 EN R1.3